下穿既有线框架桥涵顶进施工轨道在线监测预警
一、前言
下穿高铁的框架涵顶进施工包括挖孔桩、降水、路基处理、架空线路和挖土顶进等作业,对线路影响很大,为随时掌握线路几何尺寸及其它部位的变化情况,确保行车安全,需要每通过一趟列车就要人工用道尺对线路检查一次即一列一检。因架空便梁长,梁内作业空间狭窄,来车时作业人员在便梁范围内无法下道避车,存在很大安全风险;高铁行车密度大,间隔时间短,人工很难做到一列一检,如有安全隐患将错过第一时间处理。如何在确保施工地段人身、行车安全的基础上,又能准确、及时、全面、方便地掌握线路的结构变化情况成为当前迫切需要解决的课题。
二、项目实施背景
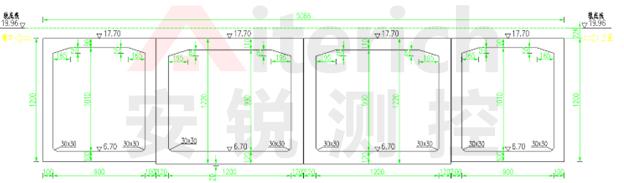
三横路凤凰段工程(二期)道路全长4.430km,建成后将是三亚火车站与三亚凤凰国际机场之间的快捷通道。K0+120-K0+460(二标段)项目主要建设内容中的桥梁(下穿西环高铁顶进框架桥)部分,与海南环岛高铁西段交叉采用框架桥方式下穿铁路路基,框架桥长29.6m,共4孔框架,两侧各设一孔非机动车道(含人行道,框架内宽9.0m、内高6.5m),中间设两孔机动车道(框架内12.0m、内高6.1m)。

图1-1框架桥平面布置图

 图1-2框架桥正断面图
图1-2框架桥正断面图
框架顶进线路架空范围104.2m,影响范围144.2m,施工影响范围K340+944.9—K341+099.1。通过本区段列车时速160km/h,施工影响期间需慢行至45km/h,慢行范围为施工区每端800m,慢行区域为K340+144.9—K341+899.1。
三、系统原理及构成
3.1研发历程
课题立项后,经过专家组对需求进行分析,确定动态测量轨道的实时位移为本项目的关键技术点。需要在不影响安全,列车在运行时也能够实时测量轨道的动态位移的自动化在线监测系统,目前市面上面没有合适的现有技术。因此重点研究钢轨动态位移测量传感器及配套技术。
先后研发了基于二维码的机器视觉动态位移测量技术和动力水准测量技术,并最终确定采用成熟的动力水准测量技术来实施本项目。
针对本项目的需求,首先采用的是机器视觉原理实现的位移测量方法:在钢轨等待测结构物上贴装或喷涂带有信息的二维码。当AI摄像机检测到二维码后对二维码内的信息进行解码。根据解码数据从云端数据库中获取到该二维码对应的项目信息,如二维码的真实尺寸、其他辅助修正传感器的情况及其数据相关算法等信息。当二维码在空间中发生位移时,视频中二维码的大小及形状将发生变化;二维码沿光轴移动时,二维码的像素大小会发生变化;二维码垂直于光轴移动时,二维码像素坐标将发生变化;二维码与光轴之间的夹角发生位移时,视频中的二维码的形状将发生变化,如由正方形变为四边形。AI视频嵌入式软件根据视频中二维码的像素坐标、形状及大小变化,自动计算出对应的位移变量,从而实现对结构位移的实时监测。
通过使用二维码机器视觉技术实现日常沉降、倾斜监测,根据独特的技术实现轨道的动态挠度监测。可以实现非接触实时位移测量,且不需要在钢轨上布线供电。由于此方法具有较大的优势,因此开始了研发工作并生产了测试样机做了初步测试并取得了一定的效果。

图3-1

图3-2
随着研发进程的推进,发现二维码位移测量技术有优点也有不足:
①测点数量多,引入的基点数量和转测点数量也随之增加,增加的数量为2n的关系,在实际应用中,这会带来安装问题。
②现场安装的二维码机器视觉设备,在施工作业的时候,会受到吊车、挖机、施工人员的干扰。特别是在D型梁位置,施工工序在进行到下穿横梁、轨枕调整、道砟回填等时,机械作业和人工作业无法避免对设备的碰触和损坏。
③列车经过时,在上行线、下行线的右侧股道因为列车经过,形成不可通视区域,这部分区域无法正常观测数据。
由于现场施工时,无法完全避免上述情况的出现,因此需要继续研发出比二维码实现轨道位移测量的技术更为先进和实用的新技术。
综上所述,需要一种即能在不通视情况下,也能测量出轨道测点的动态数据的方法。
当前测量竖向位移的静力水准测量技术,仅能实现静态测量。静力水准技术是用液体连通器原理,通过测量液体的压力来间接测量液体的深度,再与基准测点进行比较从而得到测点竖向位移的。如果系统管道内的液体受到振动影响,液体将会产生附加压力,导致数据严重错误,因此只能用于变化极为缓慢的静态沉降测量。本项目是既有线,列车通过频繁,且需要测量列车经过时的实时位移数据。因此静力水准仪无法在本项目中使用。
传统静力水准仪应用在涉铁监测项目,在列车经过时,需要特殊标记列车经过时的数据,对这些数据进行丢弃过滤处理。图3-3和图3-4为静力水准仪在铁路上的实际应用,获取的静态采集数据。图中黑点表示火车经过是的数据,可以看出火车经过时,数据波动极大,远远超过正常值的数十倍。如果采用该时间段的数据,每次火车经过都将导致错误的报警,严重干扰施工秩序。而本次课题的研究将很好的解决这一问题。

图3-3

图3-4
常规的静力水准仪不能测量动态数据的原因是液体振动的加速度会产生一个附加的力。静力水准仪测量得到的压力f与加速度满足f=m(g+a),m为液体质量,g为重力加速度,a为液体受到振动后引起的加速度。由于通常的位移变化都比较小,因此微小的加速度导致的附加压力将严重影响液体压力传感器的数据,导致数据错误。
如果能够除重力加速度之外的振动导致的动态加速度a测量出来,并据此对压力传感器的数据进行修正补偿,那么静力水准仪不但能够测量静态位移,也能够同时测量动态位移。经过样机测试,深圳安锐科技有限公司研发的动力水准仪确实能够完美的测量动态位移,同时具备普通传统的监测功能,还能测量轨道的动态挠度,即解决了二维码监测的不足,同时沿用了二维码动态监测的核心理论和核心代码算法。因此本项目全部使用动力水准仪来代替二维码实现轨道结构的动态位移测量。
由于动态采集的数据量非常大,如果不加以区分,将导致网络传输、数据存储计算等大量的资源消耗。因此在没有列车经过时,采用静态测量。有列车经过时采用动态测量。在施工现场的两端,分别安装微波雷达,测量是否有列车经过及列车的方向。通过物联网监测软件实现多传感器的数据融合实时处理,智能控制系统进行静态测量和动态测量的方式切换。
静态采集时的工作原理为:在每个测点安装一套动力水准仪,用液管和气管连通。当液面静止后所有连通容器内的液面同在一个大地水准面上▽O,由传感器测出每一测点的液位,即初始液位值分别为:H基0、H10、H20、H30、H40、·····Hi0。
设定基准点(稳定保持不动),测点1上抬,测点2不变,测点3下沉,测点4不变,当系统内液面达到平衡后形成新的水准面▽i0,则各测点连通容器内的新液位值分别为:H基、H1、H2、H3、H4、······Hi。
各测点的液位由传感器测得,各测点液位变化量分别计算为:△h基=H基-H基0、△h1=H1-H10、△h2=H2-H20、△h3=H3-H30、△h4=H4-H40、······△hi=Hi-Hi0。其它各测点相对基准点的垂直位移为:△H1=△h基-△h1、△H2=△h基-△h2、△H3=△h基-△h3、△H4=△h基-△h4、······△Hi=△h1-△hi。△Hi为正值表示该测点上抬,△Hi为负值表示该测点下沉。

图3-5
动态采集时的工作原理为:在每个测点安装一套动力水准仪,用液管和气管连通。当液面静止后所有连通容器内的液面同在一个大地水准面上▽O,由传感器测出每一测点的液位,即初始液位值分别为:H10、H20、H30、H40、·····Hi0。
当列车经过时,整车重量通过车轮作用在对应的测点,每个测点跟随铁轨整体受力情况上下往复运动,每个测点记录毫秒级的数据变换量。设定采集时长为30秒,在采集周期内,测点1采集的数据量为H11、H12、H13、H14 ······H1i,测点2采集的数据量为H21、H22、H23、H24 ······H2i,测点3采集的数据量为H31、H32、H33、H34 ······H1i,测点4采集的数据量为H41、H42、H43、H44 ······H4i,······
各测点液位变化量分别计算为:
测点1:
△h11= H11-H10、△h12= H12-H10、△h13= H13-H10、△h14= H14-H10、······△h1i= H1i-H10、
测点2:
△h21= H21-H20、△h22= H22-H20、△h23= H23-H20、△h24= H24-H20、······△h2i= H2i-H20、
测点3:
△h31= H31-H30、△h32= H32-H30、△h33= H33-H30、△h34= H34-H30、······△h3i= H3i-H30、
测点4:
△h41= H41-H40、△h42= H42-H40、△h43= H43-H40、△h44= H44-H40、······△h4i= H4i-H40、
······
以上是每个测点动态采集的数据换算过程。动态采集必须使用动力水准仪,如使用传统的静力水准仪,将无法正确采集数据。
3.2系统构成
构健康自动化在线监测系统主要分为4部分:传感器数据采集系统、物联网网关系统、云端服务器,后端管理显示系统。其中物联网网关和云端服务器系统为整个系统的枢纽,传感器把数据采集后发送到物联网网关。网关对原始数据做数字化处理,将数据本地存储,同时4G无线网络把数据上传到云服务器,服务器对数据进行存储及进一步的分析判断。如果有异常,就发送信息到相关负责人的手机和电脑上进行预警。云服务器将数据下发到指挥部的PC电脑上进行存储备份和数据曲线显示。
传感器数据采集部分使用深圳安锐科技的动力水准仪及配套的物联网关,以实现海量动态数据的本地化边缘计算,结果再上传安锐测控云平台,从而实现现场报警及数据显示等功能。
动力水准仪的特点:在非列车经过时间,实现静态数据采集;在列车经过时自行触发实现高频率采集,每秒钟采集的数据可达30个,然后经过算法处理,输出列车经过时轨道对应测点的动态挠度数据,可以在后端进行处理显示。
动力水准系统由水压力传感器、压力传导管道和液体容器组成,液体容器给整个液压系统提供量程范围内的稳定的液体,液体管道联通所有动力水准仪传感器,保证处于同一个连通器内,气管连接各个传感器的液面,保证所有传感器受到相同的大气压力,减少列车风压和高差对传感器的影响。动力水准仪传感器由扩散性非晶硅压力传感器测出,用内置的压力变送器转换为数字信号,通过485总线传输到物联网关进行初步的加工和处理再推送到云平台。
以上描述的测点位置除了路基部分,轨道轨底和挖孔桩顶部同样适用动力水准仪。
当钢轨上的动力水准仪检测到列车即将到达的加速度变化时,触发动力水准仪进入高频采集模式。经过多传感器的数据融合后,得到钢轨的动态挠度数据;列车离开后,动力水准仪自动进入低频采集模式,正常频率采集,获取静态沉降数据。
倾角传感器:监测轨道、接触网立柱、挖孔桩的倾斜,倾角传感器为三轴传感器,可分别监测X/Y/Z轴变化。

图3-6 系统结构图
3.3系统功能
无人自动化的物联网实时监测预警系统满足在系统初始化完成后,自动运行。在监测值超过设定的阈值时,发送报警短信(指定接收人手机号可多选),发送报警信息至后端(管理端)进行显示和报警。整个系统采用无人值守24小时自动运行的方式工作,以便对施工过程中可能出现的沉降和倾斜问题,及时进行预警,而无需人工干预。通过该物联网监测系统,能使项目施工安全得到更好的保障。
构健康自动化在线监测系统的主要功能为:
1、实时监测
(1)、通过物联网位移传感器实时测量。
(2)、通过4G无线网络传输至安锐测控云平台显示。
(3)、通过云服务器进行数据的转发和存储。
(4)、获取水平值、水平差和动态挠度数据。
(5)、获取沉降值和倾斜角度。
2、实时预警
(1) 通过手机APP软件及短信进行报警。
(2) Windows端、平台发出报警声音警示。
(3) 现场报警,监测点的位移大于设定阈值时,即时提醒现场人员。
四、系统实施
测点选择、布放和安装。
(一)选点和布网
1、基准点
2、轨道-上行线
3、轨道-下行线
4、挖孔桩
5、路基和其它
6、设备柜
(二)监测计划及频率
(三)监测报警指标值
1、累计沉降报警:
2、报警阀值:
(四)完成的工作量
五、系统设备清单
| 序号 |
名称 |
说明 |
单位 |
数量 |
|
1 |
动力水准仪 |
超轻型数字动力水准仪,安装位置灵活,可实时测量监测点的沉降数据。量程高达1000m,分辨率为1mm。每套一个基准,一个备用。 |
台 |
|
|
2 |
PU液体平衡管 |
高压透明PU专用管 |
米 |
|
|
3 |
PU气体平衡管 |
高压透明PU专用管 |
米 |
|
|
4 |
数据电缆 |
专用屏蔽数据水工电缆RVVP2*1.5 |
米 |
|
|
5 |
动力安装支架 |
动力水准仪专用支架1 |
套 |
|
|
|
动力水准仪支架 |
动力水准仪专用支架2 |
套 |
|
|
6 |
液压罐体 |
钢质 |
个 |
|
|
7 |
物联监测网关 |
嵌入式固件设计,软硬件一体化,采用SOC片上系统,具备高可靠性及安全性,所有控制功能的中枢硬件平台:1识别、读取及网络上传各种传感器的数据 2、接入云服务器指令信号,3、接收远程授权人员指令,控制现场设备工作 |
套 |
|
|
9 |
通讯数据连接头 |
4芯T型三通防水连接器 |
个 |
|
|
10 |
开关电源 |
精密稳压低纹波12V30A |
台 |
|
|
|
|
|
|
|
|
12 |
物联网网卡 |
电信物联网网卡,移动物联网网卡。含1年的4G数据流量 |
张 |
|
|
13 |
位移传感器 |
测量测点动态位移,专利产品 |
套 |
|
|
14 |
倾角传感器 |
测量测点倾斜角度 |
套 |
|
|
17 |
电器控制柜 |
钢质,含轨道等电器安装附件 |
个 |
|
|
18 |
安装耗材 |
铁丝、膨胀螺丝、轧带等 |
批 |
|
|
20 |
安锐测控云平台软件 |
云服务器的方式做数据转发,以实现物联网网关的数据远程控制、连接设备和电脑及手机,保存各种控制策略等。含软件使用及1年的云服务器租用费 |
套 |
|
|
21 |
短信服务 |
把报警信息以短信的形式推送到手机,避免因手机软件没有打开收不到现场报警信息的情况发生,含1年的短信使用费 |
年 |
|
|
22 |
Winows电脑端软件 |
Windows平台,实时显示现场传感器数据和监测视频、照片 |
套 |
|
|
24 |
交换机 |
提供数据交换网络,24口,千兆 |
台 |
|
|
25 |
网络线缆 |
网络链路 |
箱 |
|
|
26 |
电缆 |
RVV 2*1.5,各个监测点电源 |
米 |
|
|
29 |
基准点墩台 |
放置水罐、基准点等。 |
套 |
|
六、课题成果
经过近24个月的工作,取得了以下成果:
(一)预警系统
(二)专用软件
(三)专用的硬件
(四)获得的数据